


Arduino Motor/Stepper/Servo Shield for Arduino
아두이노 우노 R3 / 아두이노 메가 2560 보드에 적층형으로 사용할 수 있는 모터 실드입니다.
서보 모터 / DC 모터 / 스테퍼 모터 사용하기 위한 쉴드입니다.
DC 모터는 4개를 구동할 수 있습니다. 스테퍼 모터는 2 개, 필요에 따라 왼쪽 상단의 서보 모터 포트에
서보 모터 2 개 사용할 수 있습니다.

DC 모터는 아래의 표시된 A,B 에 연결하여 사용됩니다.

스펙 정리.
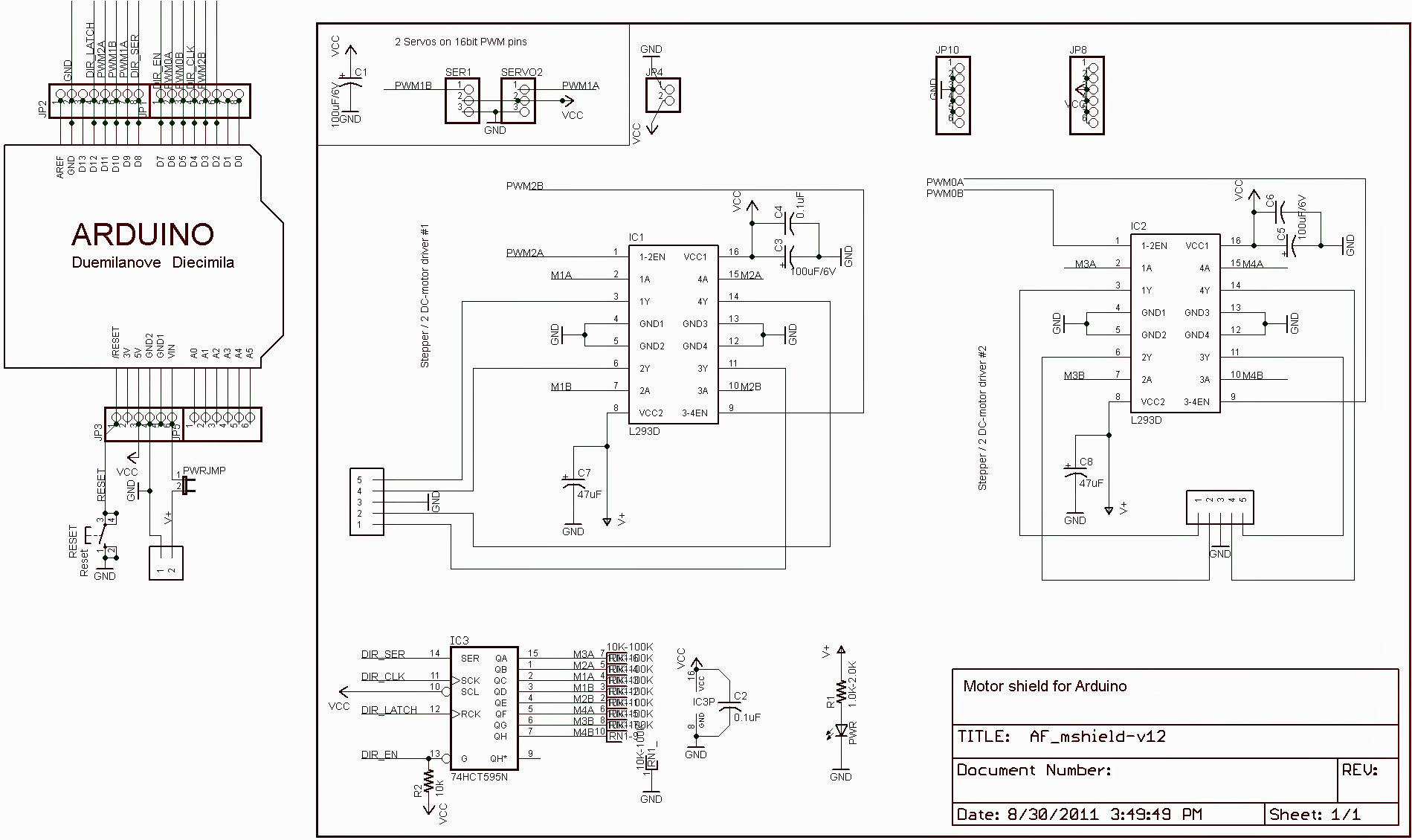
Multi-Motor Driver Shield (2-L293D)
- Four H-Bridges: Two L293D Motor driver chips
- L293D is rated at 0.6A per bridge (1.2A peak) with thermal shutdown protection, internal kickback protection diodes.
- Motor Voltages from 4.5VDC to 16VDC. (up to 36V if C6 and C7 are upgraded)
- Up to 4 bi-directional DC motors with individual 8-bit speed selection (256 speeds)
- Up to 2 stepper motors (unipolar or bipolar)
- Pull down resistors keep motors disabled during power-up
- Separate Logic and Motor power connections
- Terminal block connectors for motors and power
- 2 connections for 5V 'hobby' servos
AccelStepper Driver Library HERE:
How-To and Examples from Lady ADA HERE:
아두이노 모터실드 자료 사이트
--> http://playground.arduino.cc/Main/AdafruitMotorShield
--> 라이브러리 & 예제 다운로드
위의 라이브러리를 스케치 IDE 라이브러리 디렉토리에 설치( 복사 ) 를 해줍니다.
스케치 예제 코드
DC 모터 작동 하기 위해서는 AF_DCMotor 라는 클래스를 사용합니다.
DC 모터 작동 되기 위해서는 PC의 USB 연결 전원으로만 정확한 테스트가 안됩니다.
아두이노 우노 R3 보드의 DC Jack 9V ( 7V 이상 - DC 모터 2개 정도 연결시 ) 연결 해주어야 합니다.
또는 293D 실드의 EXT_POWER 터미널 블럭에 9V 정도 입력해주면 제대로 작동 됩니다.
DC 모터 4개 사용 예제입니다.
각각의 모터는 위의 이미지의 A,B 에 연결해 주도록 합니다.
// M 1 에 DC 모터 연결된 경우.
// M 2 에 DC 모터 연결된 경우.
// M 3 에 DC 모터 연결된 경우.
// M 4에 DC 모터 연결된 경우.
AF_DCMotor motor1(1); //
AF_DCMotor motor2(2); //
AF_DCMotor motor3(3); //
AF_DCMotor motor4(4); //
void setup() {
Serial.begin(9600); // set up Serial library at 9600 bps
Serial.println("DC Motor 4 pcs test");
motor1.setSpeed(200); // 최대 255
motor2.setSpeed(200); // 최대 255
motor3.setSpeed(200); // 최대 255
motor4.setSpeed(200); // 최대 255
motor1.run(RELEASE); // 정지와 같습니다. DC 모터 정지
motor2.run(RELEASE); // 정지와 같습니다. DC 모터 정지
motor3.run(RELEASE); // 정지와 같습니다. DC 모터 정지
motor4.run(RELEASE); // 정지와 같습니다. DC 모터 정지
delay(2000);
}
// 1초다마 1개씩 순차적으로 회전해봅니다.
void loop()
{
Serial.println("1");
motor1.run(FORWARD);
delay(1000);
motor1.run(RELEASE);
Serial.println("2");
motor2.run(FORWARD);
delay(1000);
motor2.run(RELEASE);
Serial.println("3");
motor3.run(FORWARD);
delay(1000);
motor3.run(RELEASE);
Serial.println("4");
motor4.run(FORWARD);
delay(1000);
motor4.run(RELEASE);
}

{kind=link}
